ZLTECH 24V-48V DC 30A CAN RS485 driver del controller del servomotore per macchine CNC





Il servoazionamento è una parte importante del moderno controllo del movimento ed è ampiamente utilizzato nelle apparecchiature di automazione, come robot industriali e centri di lavoro CNC.La tecnologia di servoazionamento, come una delle tecnologie chiave per il controllo di macchine utensili CNC, robot industriali e altri macchinari industriali, ha ricevuto grande attenzione negli ultimi anni.
Il servoazionamento utilizza un processore di segnale digitale (DSP) come nucleo di controllo, che potrebbe realizzare algoritmi di controllo più complessi e realizzare digitalizzazione, networking e intelligenza.Allo stesso tempo, dispone di circuiti di rilevamento e protezione dei guasti tra cui sovratensione, sovracorrente, surriscaldamento, sottotensione e così via.
Il controllo del servoazionamento è suddiviso in loop di posizione, loop di velocità e loop di corrente in base al suo oggetto di controllo dall'esterno verso l'interno.Di conseguenza, il servoazionamento può supportare anche la modalità di controllo della posizione, la modalità di controllo della velocità e la modalità di controllo della coppia.La modalità di controllo del driver può essere fornita in quattro modi: 1. Impostazione della quantità analogica, 2. Impostazione interna dell'impostazione dei parametri, 3. Impostazione dell'impulso + direzione, 4. Impostazione della comunicazione.
L'applicazione dell'impostazione interna dell'impostazione dei parametri è relativamente limitata ed è limitata e regolata gradualmente.
Il vantaggio di utilizzare l'impostazione della quantità analogica è la risposta rapida.Viene utilizzato in molte occasioni ad alta precisione e ad alta risposta.Il suo svantaggio è che non c'è deriva zero, il che porta difficoltà al debugging.I servosistemi europei e americani utilizzano principalmente questo metodo.
Il controllo degli impulsi è compatibile con i comuni metodi di segnale: CW/CCW (impulso positivo e negativo), impulso/direzione, segnale di fase A/B.Il suo svantaggio è la bassa risposta.I servosistemi giapponesi e cinesi utilizzano principalmente questo metodo.
L'impostazione della comunicazione è attualmente il metodo di controllo più comunemente utilizzato.I suoi vantaggi sono l'impostazione rapida, la risposta rapida e una ragionevole pianificazione del movimento.La modalità comune di impostazione della comunicazione è la comunicazione bus, che semplifica il cablaggio e il protocollo di comunicazione diversificato offre inoltre ai clienti più scelte.
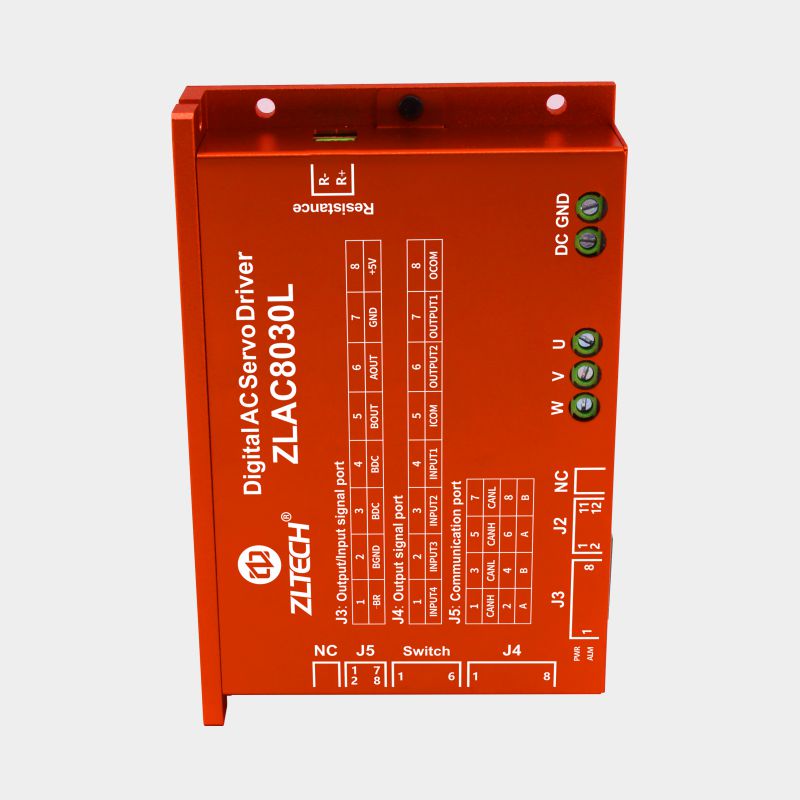
ZLAC8030 è un servoazionamento digitale ad alta potenza e bassa tensione sviluppato in modo indipendente da loro stessi.Il suo sistema ha una struttura semplice e un'elevata integrazione.Aggiunge la comunicazione bus e le funzioni di controllore ad asse singolo.È principalmente abbinato a servomotori da 500 W-1000 W.
Parametri
| NOME DEL PRODOTTO | AUTISTA SERBO |
| P/N | ZLAC8030L |
| TENSIONE DI LAVORO(V) | 24-48 |
| CORRENTE DI USCITA(A) | NOMINALE 30A, MAX 60A |
| METODO DI COMUNICAZIONE | CANOPEN、RS485 |
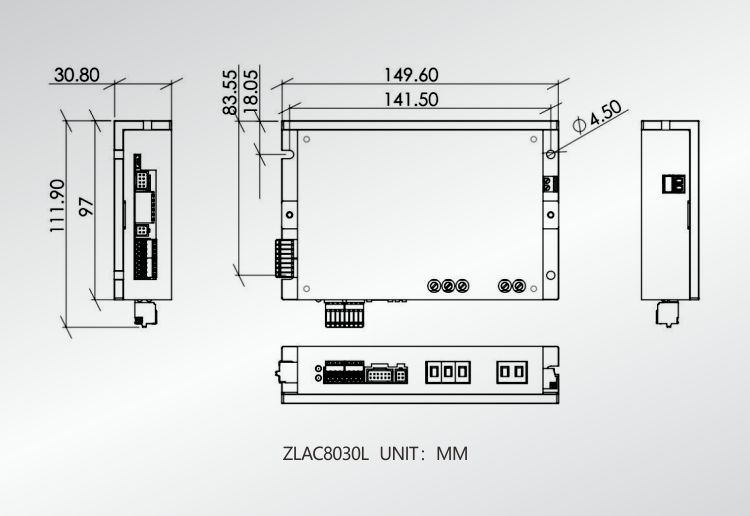
| DIMENSIONE(mm) | 149,5*97*30,8 |
| SERVO MOTORE DEL MOZZO ADATTATO | SERVO MOTORE DEL MOZZO AD ALTA POTENZA |
Dimensione
Applicazione

Imballaggio

Dispositivo di produzione e ispezione

Qualificazione e certificazione

Ufficio e fabbrica

Cooperazione

Categorie di prodotti
-

ZLTECH Trifase 60mm Nema24 24V 100W/200W/300W/40...
-

ZLTECH 42mm 24V 1.5A 0.5Nm CANopen integrato ...
-

ZLTECH 6.5 pollici 24V-48V 150W 120kg BLDC elettrico...
-

Motore del mozzo ZLTECH da 9,5 pollici 48V 20N.m per agricult ...
-

Encoder ZLTECH Nema23 CANopen integrato step-s...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V gradino integrato...





