ZLTECH 24V-36V 5A DC elettrico Modbus RS485 controller driver motore brushless per AGV


















FUNZIONALITÀ E UTILIZZO
1 modalità di regolazione della velocità
Regolazione della velocità di ingresso esterna: collegare 2 terminali fissi del potenziometro esterno rispettivamente alla porta GND e alla porta +5v del driver.Collegare l'estremità di regolazione all'estremità SV per utilizzare il potenziometro esterno (10K~50K) per regolare la velocità o tramite altre unità di controllo (come PLC, microcomputer a chip singolo e così via) immettere la tensione analogica all'estremità SV per realizzare la regolazione della velocità (rispetto a GND).L'intervallo di tensione di accettazione della porta SV è da DC OV a +5 V e la velocità del motore corrispondente è compresa tra 0 e velocità nominale.
2 Controllo marcia/arresto motore (EN)
La marcia e l'arresto del motore possono essere controllati controllando l'accensione e lo spegnimento del terminale EN relativo a GND.Quando il terminale è conduttivo, il motore funzionerà;altrimenti il motore si fermerà.Quando si utilizza il terminale di marcia/arresto per arrestare il motore, il motore si arresterà naturalmente e la sua legge di movimento è correlata all'inerzia del carico.
3 Comando marcia avanti/indietro motore (F/R)
La direzione di marcia del motore può essere controllata controllando l'accensione/spegnimento del terminale F/R e del terminale GND.Quando F/R e il terminale GND non sono conduttivi, il motore girerà in senso orario (dal lato dell'albero motore), altrimenti il motore girerà in senso antiorario.
4 guasto del conducente
Quando si verifica sovratensione o sovracorrente all'interno del driver, il driver entrerà nello stato di protezione e smetterà automaticamente di funzionare, il motore si fermerà e la luce blu sul driver si spegnerà.Il driver rilascerà l'allarme quando il terminale di abilitazione viene resettato (cioè, EN è disconnesso da GND) o l'alimentazione viene spenta.Quando si verifica questo guasto, verificare il collegamento del cablaggio con il motore o il carico del motore.
5 Porta di comunicazione RS485
La modalità di comunicazione del driver adotta il protocollo Modbus standard, conforme allo standard nazionale GB/T 19582.1-2008.Utilizzando la comunicazione di collegamento seriale a 2 fili basata su RS485, l'interfaccia fisica utilizza una porta di cablaggio convenzionale a 3 pin (A+, GND, B-) e la connessione seriale è molto comoda.
Parametri
| Autista | ZLDBL4005S |
| Tensione in ingresso (V) | 24V-36V CC |
| Corrente di uscita (A) | 5 |
| Metodo di controllo | Modbus RS485 |
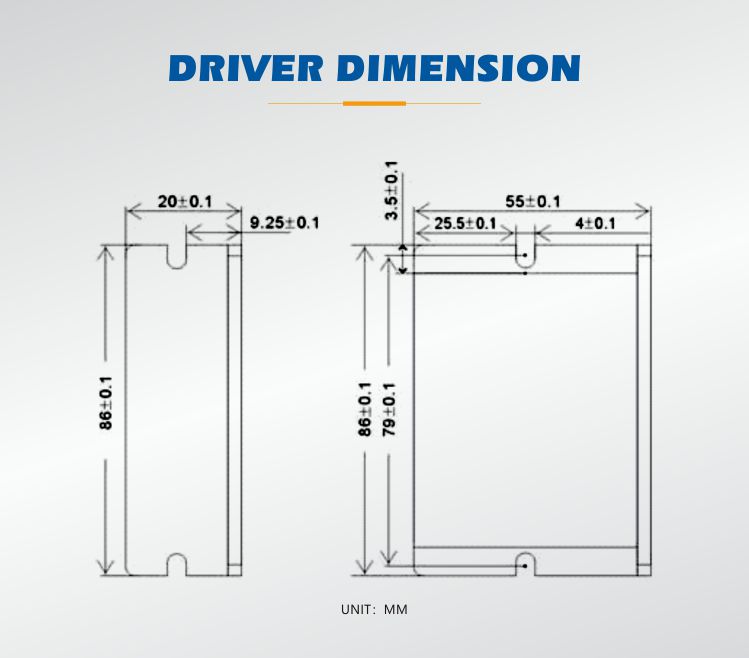
| Dimensione (mm) | 86*55*20 mm |
| Peso (kg) | 0.1 |
Dimensione
Applicazione

Imballaggio

Dispositivo di produzione e ispezione

Qualificazione e certificazione

Ufficio e fabbrica

Cooperazione

Categorie di prodotti
-

2S86 ZLTECH serie 86 DC 36V 48V AC 27V-75V clo...
-

ZLTECH 24V-48V 30A Canbus Modbus doppio canale D...
-

ZLTECH Motore mozzo brushless CC da 15 pollici 200 kg con ...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V gradino integrato...
-

ZLAC8030L ZLTECH 20V-60V 60A CANOPEN RS485 DC s...
-

ZLTECH 57mm Nema23 motore passo-passo integrato con d...





